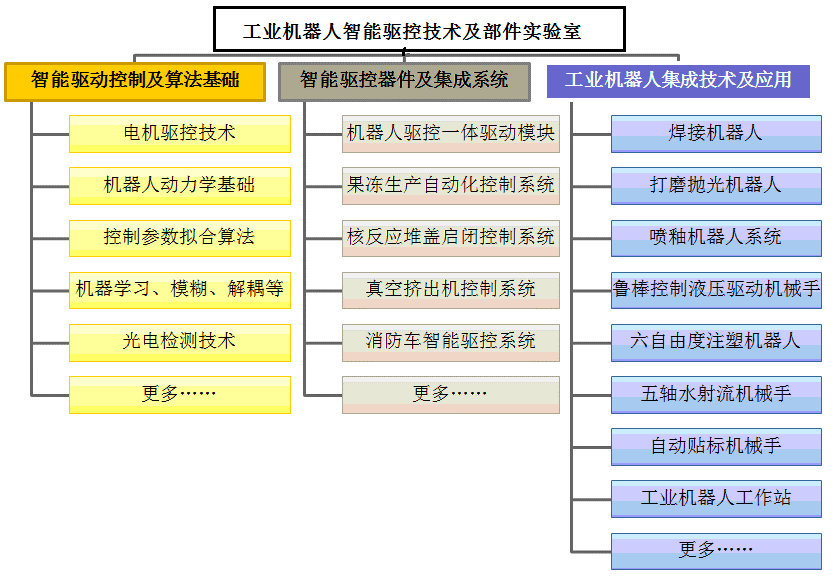
广州市“工业机器人智能驱控技术与集成应用重点实验室,主要集中在以下三个方向进行科学研究:
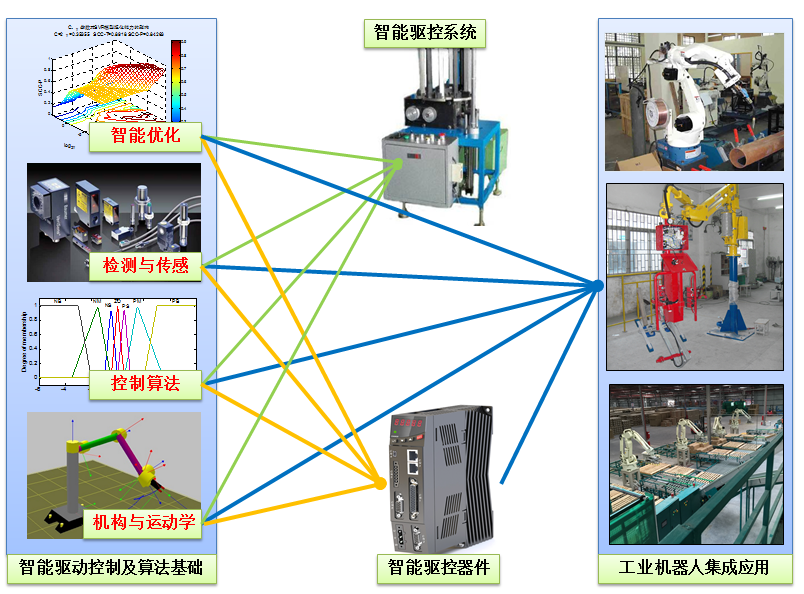
研究方向关系图
● 研究方向一:智能驱动控制理论及控制算法基础
开展控制算法与智能控制理论方面的基础研究,针对机器学习控制、模糊控制、鲁棒控制、解耦控制理论等控制方法进行了研究与探索,对相关算法进行了深入研究。通过基础理论研究,有效提高了工业机器人及相关装备的控制性能与智能化程度,推动了相关领域的技术进步。
● 研究方向二:智能驱控集成系统及部件
工业机器人的伺服驱动部件直接影响其性能,本方向开展伺服驱动软硬件系统集成及器件的研究。开发驱控一体化的机器人驱动器,研究多种自动化装备中的智能驱控系统。
● 研究方向三:工业机器人集成技术及应用
开展工业机器人集成及技术应用研究,开展技术改造提升传统产业,开发多种工业机器人及多机器人高速协调应用,提高生产和运行效率,推进节能减排,保障安全生产,目前已开发了多种工业机器人,大部分项目成功进行了产业化,取得了显著的经济社会效益。
围绕这三个方向,实验室进行了大量的研究,部分研究案例如下图所示。
研究方向典型案例
本实验室主要成果如下:
1. 申报发明专利120项,授权50件,申报实用新型专利130项;
2. 实现了成果转化40项,辐射扩散成果20项;
3. 承担国家级科研项目6项;
4. 承担省、部级科研项目10项;
5. 与企业合作项目80项,开发新产品6项;
6. 获国家专利奖1项,省市级科学技术类奖项12项;
7. 引进了国家级、省级人才2人。